- Главная
- AL-FARABI NEWS LETTERS
- В Казахском национальном университете имени аль-Фараби запущен научно-прикладной проект по разработке системы управления ориентацией наноспутника
В Казахском национальном университете имени аль-Фараби запущен научно-прикладной проект по разработке системы управления ориентацией наноспутника
В Казахском национальном университете имени аль-Фараби начата реализация научно-прикладного проекта, направленного на разработку системы определения и управления ориентацией наноспутника формата 3U для задач дистанционного зондирования Земли. Проект рассчитан на период 2025–2027 годов и реализуется в рамках приоритетного направления развития науки «Передовое производство, цифровые и космические технологии». Современное развитие космических технологий характеризуется расширением применения малых космических аппаратов, включая микроспутники и наноспутники, которые рассматриваются как экономически эффективный инструмент для получения научных и прикладных результатов. Международный опыт показывает, что доля малых космических аппаратов в миссиях дистанционного зондирования Земли превышает 30%, что подтверждает растущую значимость развития наноспутниковых мониторинговых технологий.
Одним из ключевых условий эффективной работы космического аппарата является обеспечение высокоточной системы управления ориентацией. Стабильная пространственная ориентация наноспутника по трём осям напрямую влияет на качество получаемых спутниковых изображений. Следует отметить, что ранее разработанные университетские наноспутники al-Farabi-1 и al-Farabi-2 были успешно выведены на орбиту, однако они не имели высокоточной системы ориентационного управления и специализированных камер для дистанционного зондирования Земли, что ограничивало функциональные возможности миссий. Предлагаемый проект направлен на устранение данных технических ограничений.
Научная новизна проекта связана с разработкой интегрированной системы управления угловым движением наноспутника, основанной на комплексном применении магнитных исполнительных механизмов и маховиков. Магнитные катушки будут использоваться для демпфирования угловых скоростей и обеспечения грубой ориентации аппарата, тогда как маховики позволят реализовать высокоточную стабилизацию пространственного положения наноспутника.
В ходе исследования планируется применение современных методов теории управления, включая PID-регуляторы, линейно-квадратичное управление (LQR), методы размещения корней, робастные контроллеры μ и H∞, расширенный фильтр Калмана, алгоритмы модельного прогнозирующего управления, а также методы Bdot-демпфирования, скользящего и адаптивного управления. Реализация проекта позволит повысить уровень технологической готовности разработки с TRL-2 до TRL-4.
В рамках проекта будут разработаны алгоритмы магнитного управления ориентацией для обеспечения точности наведения камеры в пределах 3–5 градусов при использовании камеры с разрешением 40 метров, а также алгоритмы высокоточного управления с применением маховиков для достижения точности ориентации не хуже 1 градуса для камеры с разрешением 6 метров. Кроме того, будет создана интегрированная архитектура управления, обеспечивающая синхронизацию работы двух камер с различным пространственным разрешением.
В процессе научного исследования будут использованы методы математического моделирования динамики углового движения наноспутника, аналитические и численные методы решения дифференциальных уравнений, включая методы Рунге–Кутты, Адамса и Милна, формализм Гамильтона–Якоби, уравнения Эйлера, теория кватернионов для описания пространственной ориентации аппарата, а также методы анализа устойчивости по Ляпунову. Имитационное моделирование планируется проводить с использованием программных комплексов MATLAB/Simulink, MSC Marc, Dytran и COMSOL Multiphysics.
Важной частью проекта является международное научное сотрудничество с профессором Шиничи Накасука из Токийского университета, который является признанным специалистом в области разработки малых космических аппаратов. Под его руководством планируется проведение экспериментальной верификации разработанных алгоритмов управления с использованием высокоточных измерительных стендов и реальных орбитальных данных функционирующих наноспутников.
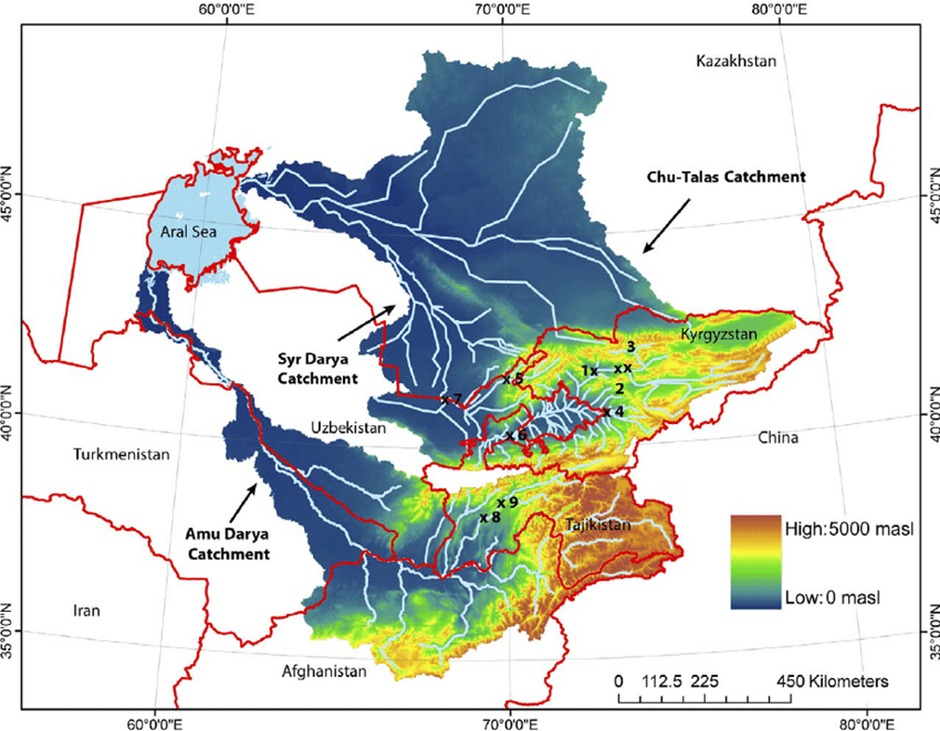
Ожидается, что результаты проекта будут способствовать развитию космической инженерии Казахстана, формированию научной базы для создания малых космических аппаратов, расширению возможностей коммерциализации космических технологий и повышению участия страны в международных космических программах. Разрабатываемая система управления может быть применена для задач экологического мониторинга, анализа загрязнения природных объектов, исследования динамики водных ресурсов, сельскохозяйственного мониторинга с использованием технологий дистанционного зондирования, а также рационального использования природных ресурсов. Реализация проекта позволит создать энергоэффективную высокоточную систему ориентации наноспутника, повысить качество космических данных и укрепить научно-технический потенциал космической отрасли страны.
Другие новости