ҚазҰУ ғалымдары робот гуманоидтің қозғалыс жүйесін ойлап тапты
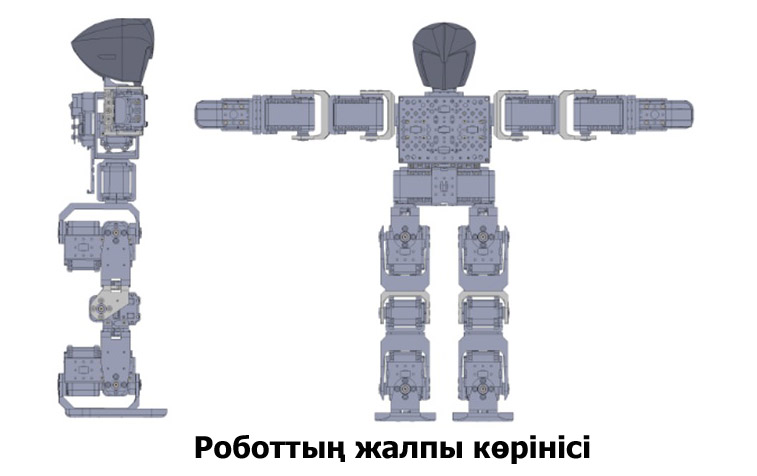
Әл-Фараби атындағы Қазақ ұлттық университеті жанындағы математика және механика ғылыми-зерттеу институтының жетекшісі, техника ғылымдарының кандидаты А.К. Ералиевтің жетекшілігімен ізденуші-ғалымдар қиын жерлерден еркін өтетін робот гуманоидтің қозғалыс жүйесін ойлап тапты, – деп хабарлайды «Ұлттық мемлекеттік ғылыми-техникалық сараптама орталығы».
Ғылыми жұмысты қолға алғанда ҚазҰУ ғалымдары өтуге қиын жерлерді құлтемірдің қозғалысын басқарып, жоспарлайтын жаңа жүйені ойлап табуды көздеген еді. Сонымен қатар робот гуманоидтың табан бөлігімен еркін айналуына баса мән беріп, құлтемірдің еркіндік дәрежесі механизмнің әсері кең көлемде зерттегенін айта кетуіміз керек. Мамандар робот гуманоидтың қозғалысын жетілдіріп басқару жүйесін қалыптастыру кезінде пассивті динамика әдістерін қолданған. Сонымен қатар ғалымдар экологиялық жағдайларда робот гуманоидтың тиімді қозғалысын қамтамасыз ететін алгоритмдерді басқаруда жергілікті реактивті навигация пайдаланғанын да айта кетуіміз керек.
ҚазҰУ ғалымдары қол жеткізген басты жетістігі - робот гуманоидтың энергияны үнемдеп, тегіс емес жерде қозғалуын қамтамасыз ететін аяқ-қолының механизмін дайындағаны.
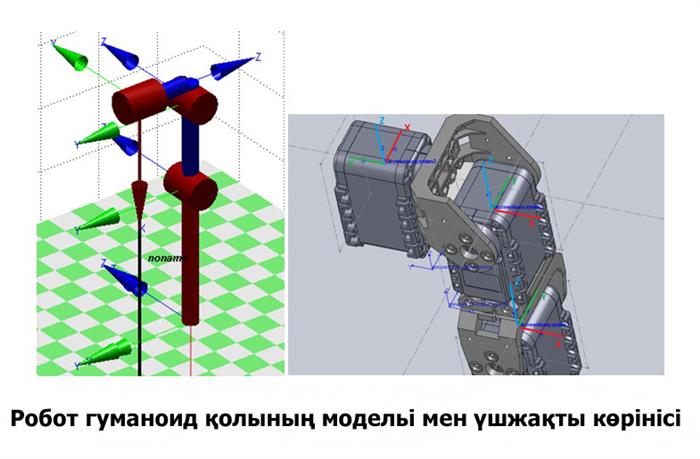
Ғылыми-зерттеу жұмысы барысында робот денесінің жоғарғы және төменгі бөлігіндегі екі звеноларды қосып, ауырлық орталығын бақылайтын арнайы шешімі жасалды. «Аяқтың ұшы», «төмен старт» жаңа қозғалыстарды жасауға мүмкіндік беріп отыр.
Құлтемірдің денесіндегі барлық звенолар мен тіректі звенолардың (қол, шынтақ, саусақтардың, аяқ басы, тізе) орнын сипаттайтын арнайы 242 матрица жазылғанын айта кетуіміз керек.
ҚазҰУ ғалымдары дайындаған құлтемір механизмі робот гуманоидтың тегіс емес жерде еркін қозғалуын ғана қамтамасыз етпейді, сонымен қатар құлтемірдің белгілі алгоритмдер арқылы қозғалыс кезінде қуат көзін үнемдейтімінен ерекшеленеді.

Басқа жаңалықтар


